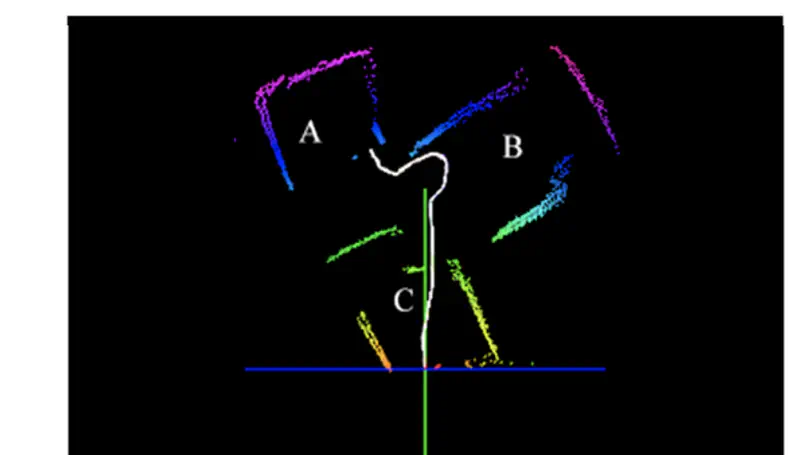
Indoor localization and mapping is an important problem with many applications such as emergency response, architectural modeling, and historical preservation. In this project, a metrically accurate, GPS-denied, indoor 3D static mapping system was developed using a moveable base coupled with three degree of freedom IMU.